Problème
On appelle distance de contrôle la distance entre le point courant et le point fixe en-dessous de laquelle on déclenche le contrôle. En d’autres termes, lorsque le système évolue, on peut calculer la distance entre le point de l’attracteur (espace des phases) correspondant à l’état courant et le point fixe repéré. Cette distance évolue au cours du temps. Lorsqu’elle est suffisamment petite, on considère qu’on se trouve au voisinage du point fixe. Dans ces conditions, on peut appliquer le contrôle (qui fait intervenir, on le rappelle, le comportement au voisinage du point fixe et les linéarisations adéquates). L’expression précédente “suffisamment petite” cache le nombre “distance de contrôle” (le terme n’est pas normalisé – je n’ai pas rencontré l’évocation de ce problème de distance de contrôle dans la littérature).
Pour être un peu plus précis, on considère que la distance de contrôle est la distance entre le point courant et le point fixe qui doit être atteinte avant de lancer le contrôle. On peut donc lancer le contrôle dans une région assez large où les linérarisations sont assez grossières. Ce qui compte, c’est que, ensuite, on se rapproche du point fixe et que le contrôle finisse par être pleinement effectif.
On peut rendre la distance de contrôle très faible de sorte qu’on soit sûr que le contrôle sera efficace une fois lancé. Seulement, dans ce cas, il faut attendre longtemps avant que le système passe très près de son point fixe. Ce temps peut être vite déraisonnable.
Cas de l’attracteur de général
Dans les applications présentées dans cet exposé, les distances de contrôle étaient telles que le contrôle se déclenchait relativement rapidement, quels que soient les conditions initiales.
Cas de l’attracteur de Hénon
Une étude plus approfondie a été menée sur l’attracteur de Hénon. On représente une zone autour du point fixe, zone dans laquelle le déclenchement du contrôle entraînera un résultat satisfaisant. Dans les autres cas, le contrôle diverge.
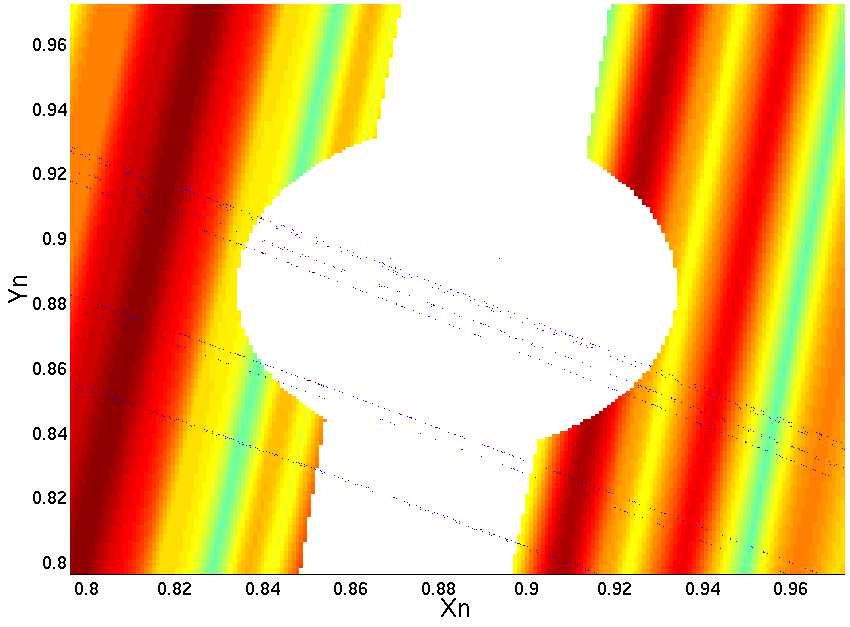
On constate que la zone peut être décrite comme l’union d’une ellipse et d’une bande rectiligne. Ce résultat est intéressant car il souligne un aspect important du comportement des points au voisinage du point fixe. En effet, la bande s’étend dans la direction stable. Dans la direction instable, l’ellipse ne s’étend guère. On comprend bien qu’un point éloigné dans la direction stable mais proche dans la direction instable sera naturellement ramené au point fixe et donc plus facilement contrôlé. Au contraire, un point très éloigné dans la direction instable implique de fortes corrections du paramètre. Ces fortes corrections peuvent être trop importantes pour que le contrôle demeure efficace. De plus, ces corrections peuvent être simplement erronées car les directions propres (stables et instables) sont trop différentes au point courant et les corrections ne se font donc plus dans une direction acceptable.