Problème
L’efficacité du contrôle dépend de l’estimation des différents paramètres intervenant dans le calcul de la correction à appliquer. Parmi ces paramètres, il y a les valeurs et vecteurs propres de la matrice jacobienne ou l’influence de la variation du paramètre sur la position du point fixe… La loi de contrôle est donc plus ou moins proche de la loi exacte.
Dans le cas de l’attracteur de Hénon, les calculs analytiques donnent les résultats exacts. Pour les autres attracteurs présentés, il faut effectuer des simulations pour obtenir ces mêmes résultats: on perd en précision. Enfin, dans une application réelle, le modèle physique lui-même est une approximation.
Les résultats suivants permettent d’étudier les incertitudes acceptables sur la loi de contrôle.
Cas de l’attracteur de Hénon
Dans le cas de l’attracteur de Hénon, l’influence de la variation des paramètres peut être simulée. En effet, comme tous les paramètres sont connus exactement on peut leur imposer de faibles variations autour de leur valeur exacte et observer le résultat sur le contrôle. Concrètement, on utilise une grille où la valeur estimée du point fixe est reportée en abscisse et la valeur propre instable estimée en ordonnée. On observe s’il y a convergence.
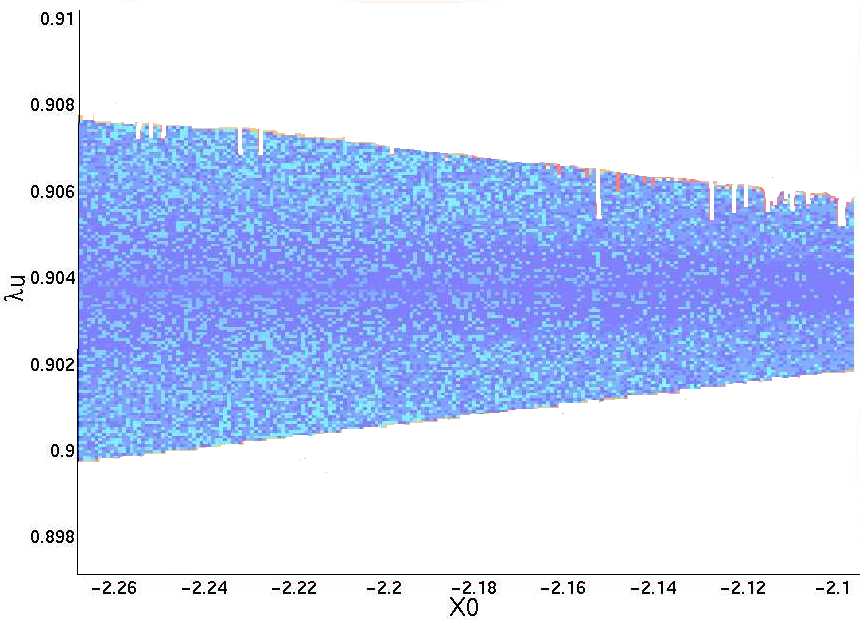
Il semble que l’algorithme soit sensible à de faibles variations de la valeur estimées du point fixe: 2 %. Cependant, si la valeur estimée du point fixe est dans le bon intervalle, l’estimation de la valeur propre instable peut être très imprécise: elle peut varier jusqu’à 40 %.
Cas de l’attracteur de Lorenz
Dans le cas du contrôle de l’attracteur de Lorenz, deux données sont essentielles. D’une part, l’estimation du point fixe. D’autre part, la pente de la loi linéaire entre le paramètre de contrôle Ra et la position Z0 du point fixe. Ces paramètres peuvent être estimés à l’aide de l’étude de sections de Poincaré, comme cela a déjà été expliqué précédemment.
Pour améliorer la précision sur ces paramètres, on procède à leur optimisation. Pour cela, on cherche à obtenir un contrôle tel que l’évolution du paramètre de contrôle au cours du temps se rapproche le plus possible de ses caractéristiques nominales. On appelle valeur finale du paramètre de contrôle la valeur autour de laquelle se stabilise le paramètre de contrôle (voir la partie sur l’évolution du paramètre de contrôle).
On optimise d’abord la valeur estimée du point fixe par la méthode soulevée précédemment.
On choisit alors la valeur de l’estimation du point fixe qui donne la valeur finale de Ra. On pose Z0 = 39.729925. On peut optimiser la valeur de la pente par la même méthode. Cela conduit à choisir comme valeur de pente 0.7433, qui donne une valeur finale du paramètre de contrôle très. proche de 28.
On peut ensuite mener la même étude que dans le cas de Hénon. Les résultats de cette étude seront présents sur ce site plus tard.
Cas de l’attracteur de Rössler
Là encore, les mêmes études peuvent être menées (on obtient une pente de 0.31 et un point fixe de première coordonnée 0.38475).